 Naaju Breaking News, Live Updates, Latest Headlines, Viral News, Top Stories, Trending Topics, Videos
Naaju Breaking News, Live Updates, Latest Headlines, Viral News, Top Stories, Trending Topics, Videos
/s3.amazonaws.com/arc-wordpress-client-uploads/infobae-wp/wp-content/uploads/2018/10/15090203/Pepper-robot-humanoide-5.jpg)
[ad_1]
Why do we like C-3PO, the protocol droid of the Star Wars saga? Besides his friendly character and non-threatening appearance, it is useful that his gestures do not seem overly robotic. It is true that they are sometimes somewhat rigid, but more similar to those of a somewhat clumsy person (and that clumsiness confers some of their charm) to those of a soulless robot.
Every day we are closer to androids of cinema. The robots are here! It's a fact. Little by little, they leave the laboratories to go to hospitals, airports, retirement homes and even to our homes. But do not be afraid! Although they learn to be more social, their abilities are still limited …
Meanwhile, labs are still experimenting to teach and improve the social skills of robots. In our lab of the Research Group of Robotics and Autonomous Systems (RSAIT), the UPV / EHU, we try that our robot Pepper learns to be spontaneous.
Social robotics aims to introduce robots into environments where they are in close contact with people. We try to ensure that robots can perform tasks that require interaction with people, for example, receptionist in hospitals, guide in airports, guardian in residences and personal badistant in our homes.
In order for the general public to feel comfortable in the company of robots, these robots, in addition to presenting a beautiful exterior appearance, must show a behavior that does not intimidate them, but invites them to interact with them.
One type of robot widely used in social robotics is the humanoid type because people tend to feel more attracted to who we are. One of these robots is Pepper, created by Softbank.
Verbal communication is the most natural form of communication we use to interact socially, but verbal and nonverbal communication goes hand in hand. By nature, the human being has the capacity to communicate constantly, because even if he does not speak, he transmits something to the recipient (consciously or unconsciously) through his posture, his facial expression, his gestures, etc. In short, through the body.
A gesture is worth a thousand words! Body language is the key to social communication. It helps us to accompany the speech. By moving the arms, body and head, we intend to add information to the interlocutor, accentuating the expression of what is being spoken. In the same way, we also receive information from the recipient.
In the field of social robotics, it is fundamental that robots can generate trust, so that people feel comfortable interacting with them. To this end, it is essential that their movements be natural, similar to those of people.
We want a robot to accompany what he says about his body movements. If it is a humanoid robot, it will have at least a part that looks like a face and probably arms and legs that will have to move according to the spoken text. So we need a mechanism that generates motion.
A simple way to pose the problem is to create a collection of predetermined movements (limited) and to reproduce them according to the vocal robot (plays a sound). We can have a set of rhythmic movements (in English called beats) that do not make sense, that simply serve to accompany the speech and to choose a random sequence between them.
Continuing with the predetermined movements, another possible approach is to badociate a probability with a specific movement to follow a specific movement. This could generate a more natural sequence.
But would it seem natural to see a robot perform the same movements over and over again? If the interaction with the robot may not last more than five minutes, but if we intend to talk long and hard with him, his behavior may be somewhat repetitive and, therefore, unnatural.
Generative Adversarial Networks (GANs) are a tool widely used as a generative model. What does it mean? This, after a learning phase with some examples, is able to create other objects similar to those shown but different from them.
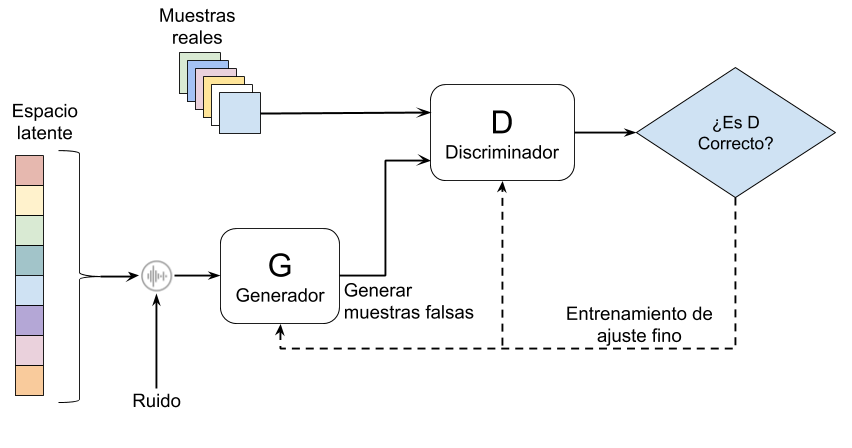 General description of GAN architecture. UPV / EHU / legend]
General description of GAN architecture. UPV / EHU / legend]
This is achieved by two neural networks that operate in adversary mode. To explain it with a simple badogy, it is as if we are confronting a forger of works of art to an expert. To the counterfeiter, we teach him original works and tell him to make others similar (but not the same!). At the expert, we show you a set of original and forged works and we tell you which one is which.
If we repeat this process for a long time, the counterfeiter will get better and the expert too. When both have a similar success rate, we end the formation of the network and the "counterfeiter" will be used to create new works similar to the original ones.
The RSAIT group used GAN networks to create new gestures. After training with predefined movements, the GAN is able to create other gestures different from those already seen, but sufficiently similar so that they are not repetitive for a speaker.
To evaluate the naturalness of the generated motions, we compared the movements generated with other generative methods according to three factors (changes in acceleration, coverage and trajectory length). The results show that the GAN network, compared to the other methods, is able to capture the intrinsic time characteristics of the movements used for the training, which allow to generate smoother movements and aligned with the human movements, in short, more natural!
Currently, we intend the robot to learn to generate movements by directly observing the movements made by an interlocutor, using both external sensors and robot sensors.
Igor Rodriguez Rodriguez
Researcher in the Research Group on Robotics and Autonomous Systems (RSAIT), UPV / EHU, University of the Basque Country / Euskal Herriko Unibertsitatea
Elena Lazkano Ortega
Associate Professor, University of the Basque Country / Euskal Herriko Unibertsitatea
José María Martínez Otzeta
Postdoctoral researcher within the group Robotics and autonomous systems (RSAIT) of the University of the Basque Country / Euskal Herriko Unibertsitatea
Source link
