
[ad_1]
Animation of the NASA Volatiles Investigating Polar Exploration Rover (VIPER) on the surface of the Moon. Credit: NASA Ames / Daniel Rutter
As any seasoned backpacker knows, to get the most out of an adventure, a good map helps. It’s no different for NASA’s first lunar robotic rover scheduled for delivery to the moon in late 2023 to search for ice and other resources on and under the lunar surface. The Volatiles Investigating Polar Exploration Rover, or VIPER, is part of the agency’s Artemis program. Without a travel guide to the moon, VIPER mission planners create new, high-resolution digital elevation maps of the lunar surface.
When equipped with these maps, the rover will be in a better position to cross the Moon safely and efficiently while searching for resources at the Lunar South Pole. Ice is a resource of special scientific interest because it can have applications if found in space and converted into other resources to continue our exploration of the solar system, such as oxygen and rocket fuel.
At a scale of about three feet (one meter), these maps provide a 3D model of large tracts of terrain at the Lunar South Pole and show the ever-changing lighting and temperature conditions caused by long shadows sweeping across the landscape. .
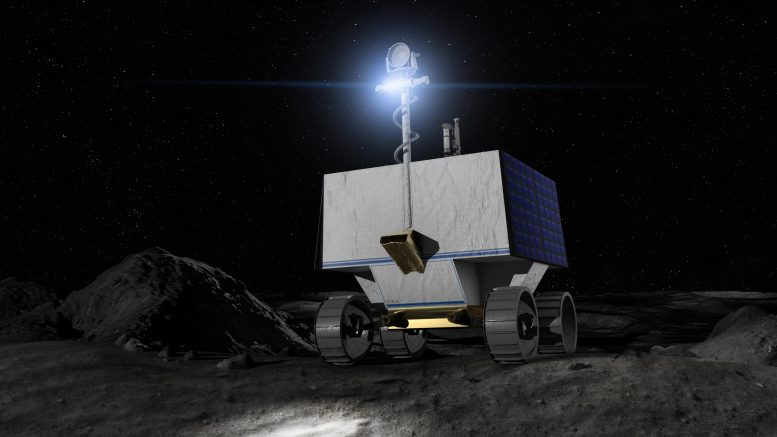
Illustration of NASA’s Volatiles Investigating Polar Exploration Rover (VIPER) on the surface of the Moon. Credit: NASA Ames / Daniel Rutter
In addition to preventing the rover from tipping over on the edges of steep craters, this close-up view of the Moon’s surface provides mission planners with vital information to ensure the rover’s solar batteries stay charged and guide the rover towards safe places to hibernate during blackouts communicating with mission operations on Earth.
“We’re sending VIPER to one of the most dynamic environments on the Moon, and the rover has to be able to take what the Moon gives,” said Anthony Colaprete, VIPER project scientist at NASA’s Ames Research Center in the United States. Silicon Valley in California. “That’s why we’re creating these unique maps – on a human scale – to help us carefully plan the rover’s routes while operating safely and collecting the best science possible.” “
Already, maps are revealing new features of scientific interest on the Moon’s surface, including many “mini cold traps” – which are shaded pockets on the lunar surface 6 to 16 feet (2 to 5 meters) high. diameter – which could be cold enough for ice to potentially collect. These micro cold traps offer areas to explore in addition to the much deeper and older craters that are the focus of the VIPER mission.
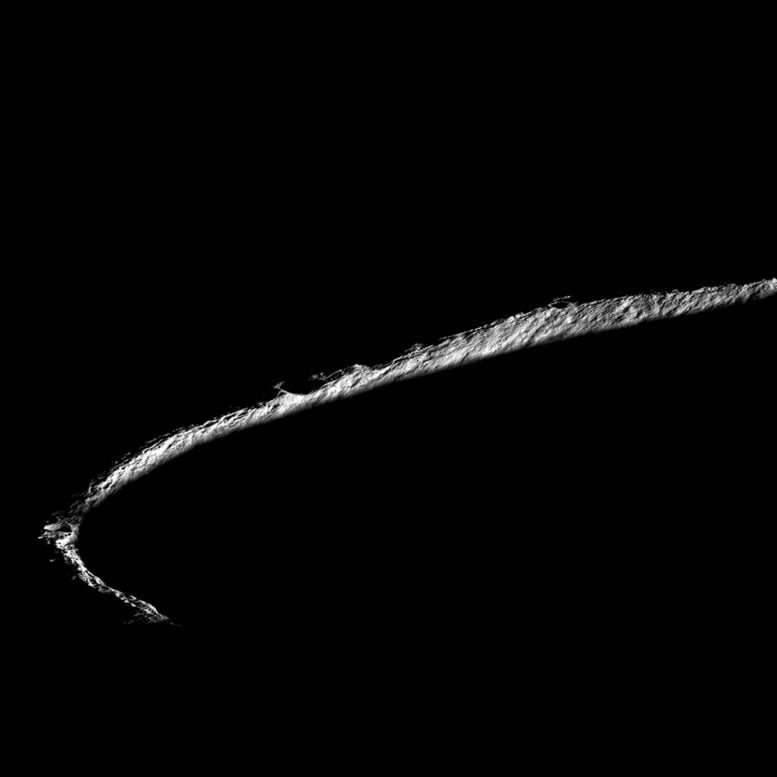
A dramatic oblique view of the edge of Shackleton Crater near the Moon’s South Pole. The crater is approximately 13 miles (21 kilometers) in diameter. Although no place on the Moon remains permanently lit, three points on the edge collectively remain lit by the sun for more than 90% of the year. These points are surrounded by topographic depressions that never receive sunlight, creating cold traps that can capture ice. The narrow-angle camera aboard NASA’s Lunar Reconnaissance Orbiter took this photo on August 1, 2006. Credit: NASA / GSFC / Arizona State University
“We were thinking of water ice accumulating only in the deep, dark craters of the Moon,” Colaprete said. “But we now believe that even small shaded craters can be cold enough to hold water molecules. These small cold traps are much more common than their larger counterparts, so it’s important to understand how they can store water. water to answer the larger question of water behavior on the Moon.
To create the elevation maps, an Ames team uses NASA’s open-source Stereo Pipeline software tool and the processing power of the Ames Pleiades supercomputer to overlay thousands of satellite images taken by high-speed cameras. aboard the Lunar Reconnaissance Orbiter.
Engineers combine these powerful tools and expertise with a photo processing capability called photoclinometry. This technique, also known as “shape from shading,” combines the known angles of sunlight with the gray levels of many two-dimensional images to infer the three-dimensional shapes of the lunar surface. The resulting model of the lunar terrain allows engineers to calculate how light and shadows play on the surface at any time in the past or future. For example, using the model, they can predict the lighting when and where the rover will land, and plan the rover’s movements to keep it in the sun and avoid shadows.
Illustration of NASA’s Volatiles Investigating Polar Exploration Rover (VIPER) on the surface of the Moon. Credit: NASA Ames / Daniel Rutter
With the known lighting conditions, the team can create detailed temperature maps over the varied terrain, on the surface and up to just over 8 feet (2.5 meters) below. Temperatures can fluctuate significantly between 400 degrees below zero and 170 degrees Fahrenheit, making the Moon’s surface a checkerboard of potentially promising and highly unlikely locations for detecting ice. Equipped with these new maps, the team can pick places where ice could be found and send VIPER to sample and verify if ice is appearing and, if so, how stable it is under various lunar conditions.
“These high-resolution maps have completely changed the way we think,” said Kimberly Ennico Smith, associate scientist for the VIPER project at Ames. “We’re starting to see how extremely varied the ground conditions on the Moon are, even in areas that we once thought were pretty uniform. This will allow us to locate the rover’s drill sites much more accurately and lead us to collect even better scientific data. ”
The VIPER team members tasked with making the rover buzz have a keen interest in seeing what the rover will face day to day – or rather minute to minute.
“The shadows move around the South Pole of the Moon at about the same speed as the rover,” said Mark Shirley, mission operations planning manager at Ames. “We have to plan ahead to keep VIPER from being overtaken by darkness – there isn’t much room for error.”
[ad_2]
Source link