

[ad_1]
UAVs are useful in many ways, but this utility is often limited by the time they can stay in the air. Should drones not be able to unload too? With these special claws attached, they can perch or hang easily, which keeps the battery charge and greatly increases their flight time.
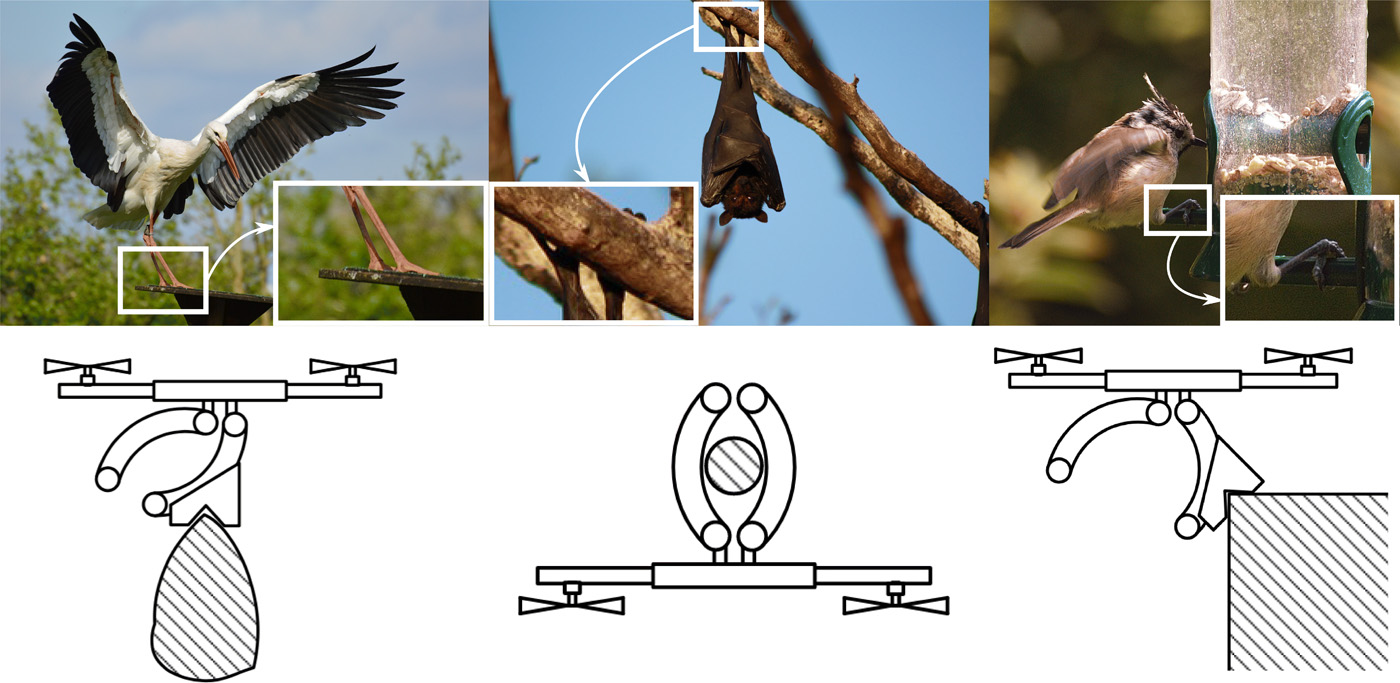
The claws, created by a very multinational team of researchers that I will enumerate at the end, are inspired by birds and bats. The team noted that many flying animals had paws or claws specially adapted for attaching the creature to its preferred surface. Sometimes they sit down, sometimes they hang up, sometimes they simply lean on it and do not have to slam so hard.
 As the researchers write:
As the researchers write:
In all these cases, a well-formed part of the animal's foot interacts with a structure of the environment and can generate less lift or completely suspend the force flight. Our goal is to use the same concept, commonly known as "perching", for UAVs. [unmanned aerial vehicles].
"Perch," do you say? Keep on going…
We designed a modular and powered undercarriage for rotary wing drones, consisting of an actuated clamp module and a set of contact modules mounted on the fingers of the clamp.
This modularization has dramatically increased the range of possible structures that can be exploited to perch and rest relative to bird-inspired forceps.
Instead of trying to build a complex mechanism, such as a pair of articulated feet, the team offered the drones a set of static modules of special shape, printed in 3D, as well as a large gripper.
The drone monitors its environment with the help of a lidar or other depth sensitive sensor. This allows him to characterize nearby surfaces and associate them with a library of examples on which he knows he can rest.
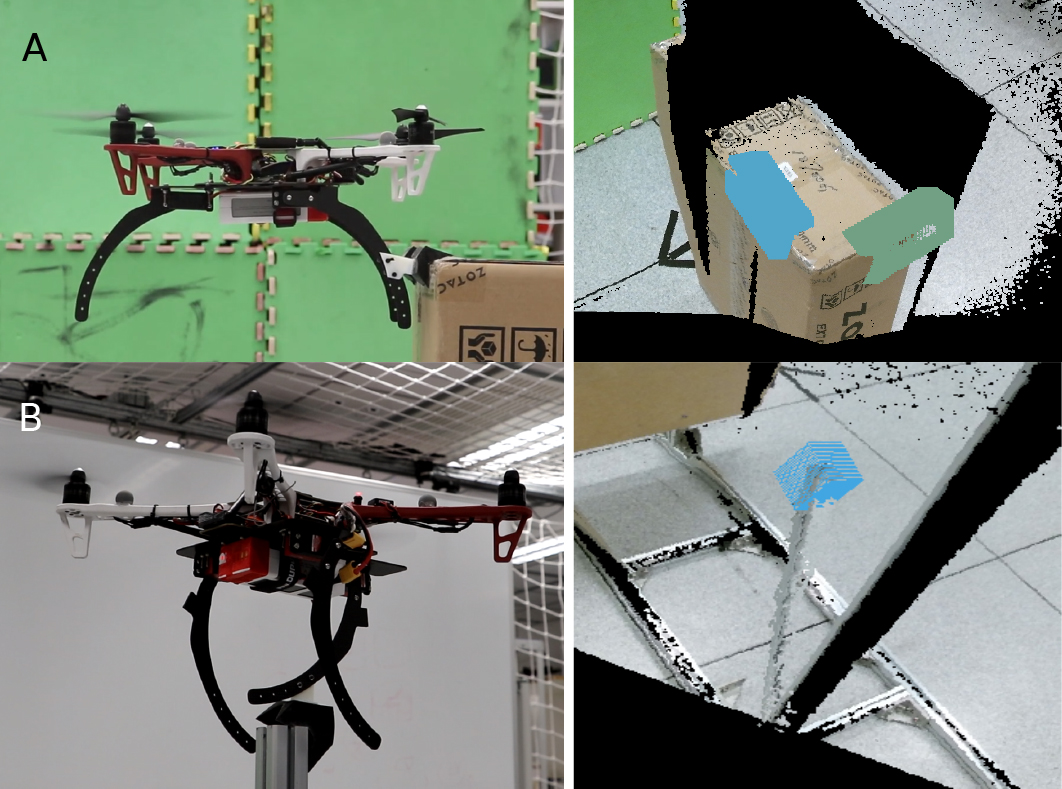
Square edges like those at the top right can be laid as in A, while a post can be balanced as in B.
If the drone sees and must rest on a pole, he can grab it from above. If it is a horizontal bar, it can grab it and hang underneath, straightening if necessary. If it is a rim, it can use a small cutout to stabilize against the corner, leaving it to turn off or turn off all engines. These modules can easily be swapped or modified according to the mission.
I must say that everything seems to work really well for a prototype. The difficulty apparently lies in the recognition of the useful surfaces and the precise positioning necessary to land correctly on them. But it is suspected enough, especially in professional and military applications, that it becomes a common feature in a few years.
The article describing this system was published in the journal Science Robotics. I do not want to leave anyone out, so it's by: Kaiyu Hang, Ximin Lyu, Song Haoran, Johannes A. Stork, Aaron M. Dollar, Danica Kragic and Fu Zhang, from the University of Science and Hong Kong Technology, Hong Kong University and KTH Royal Institute of Technology.
[ad_2]
Source link