
[ad_1]
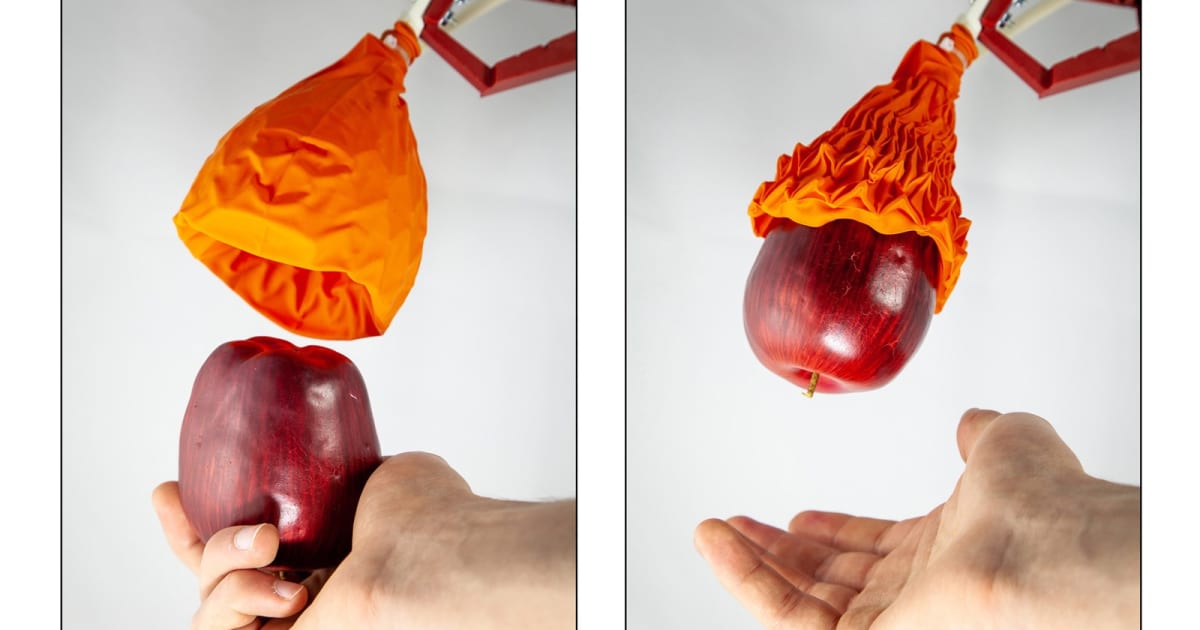
The underlying clip articulates around a 3D printed origami structure, consisting of a plastic that folds back on itself at high temperatures. He can adapt effectively to the form of what he is grasping without compromising his strength. The suction keeps the objects firmly in place, while an airtight fabric or rubber balloon skin gives it a better grip surface.
As clever as it is, there are always limits. The shape lends itself best to the seizure of round objects like bottles of fruit and wine, and preferably solid objects. There will be problems with flat objects such as books, and the suction will not help when the objects have holes. Nevertheless, this could be useful for robots that have to pick up a wide variety of objects. A medical robot can grab delicate tissue or the entire patient, while a warehouse robot at an online dealer could easily retrieve your order and prepare it for delivery.
[ad_2]
Source link