
[ad_1]

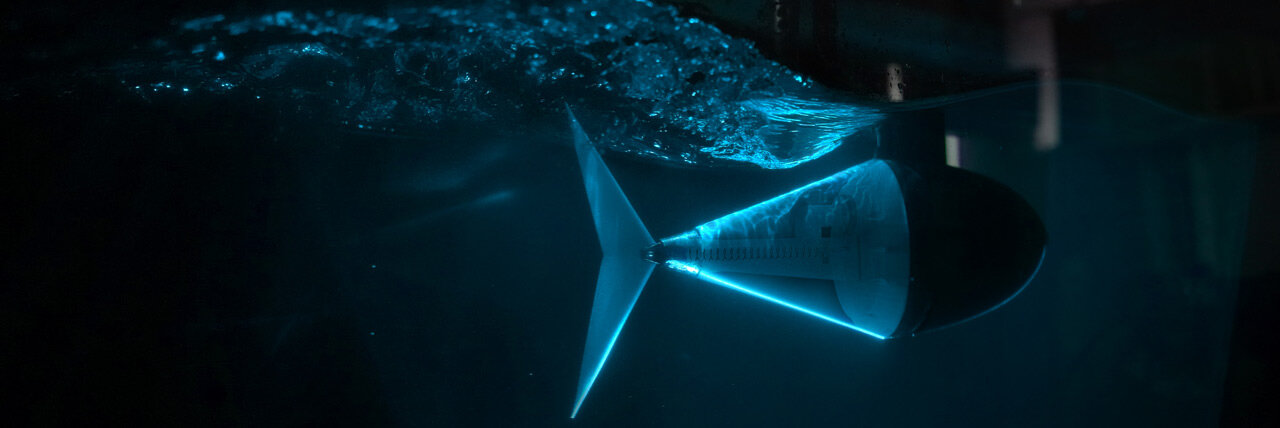
It is believed that fish adjust the stiffness of their tail in order to swim effectively over a wide range of speeds, but how and when they adjust the amount of stiffness has been a mystery. A model created by researchers at the University of Virginia School of Engineering that combines robotics, fluid dynamics and biomechanics has revealed the secret to rigidity tuning and enabled a fish-like robot swim much more efficiently than a fish without an adjustable tail. Credit: Dan Quinn and Qiang Zhong
Underwater vehicles are generally designed for cruising speed and are often inefficient at other speeds. The technology is rudimentary compared to how well, fast or slow fish swim.
What if you want your underwater vehicle to quickly travel miles of ocean, then slow down to map a narrow coral reef, or quickly get to the site of an oil spill, then scale down the speed to take precise measurements?
Dan Quinn, assistant professor in the School of Engineering and Applied Sciences at the University of Virginia, and his recent AVU doctorate colleague. graduate and postdoctoral researcher Qiang Zhong, has discovered a key strategy to enable this type of multi-speed missions. They demonstrated a simple way to implement this strategy in robots, which could ultimately inform the design of underwater vehicles. Their work was recently published in Scientific robotics.
When designing swimming robots, a question that keeps coming back to researchers is how stiff the part that propels the robots through water should be. This is a difficult question, because the same rigidity that works well in some situations can fail miserably in others.
“Having a single tail stiffness is like having a single gear ratio on a bicycle,” said Quinn, who holds joint positions in mechanical and aerospace engineering and electrical and computer engineering. “You would only be effective at one speed. It would be like cycling through San Francisco with a fixed-gear bicycle; you would be exhausted after just a few blocks. “
It is likely that fish solve this problem by adjusting their stiffness in real time: they select different levels of stiffness depending on the situation.
The problem is, there is no known way to measure the stiffness of a swimming fish, so it’s hard to know if and how fish do this. Quinn and Zhong solved this problem by combining fluid dynamics and biomechanics to derive a model explaining how and why tail stiffness should be adjusted.
“Surprisingly,” said Quinn, “one simple result came out of all the calculations: stiffness should increase with squaring speed.
“To test our theory, we built a fish-like robot that uses a programmable artificial tendon to adjust its own tail stiffness while swimming in a water channel. As much energy as the same robot with a tail at fixed stiffness. The improvement was really quite remarkable. “
Authors Qiang Zhong and Daniel Quinn are presented with the experimental setup. Credit: Yicong Fu, University of Virginia
“Our work is the first that combines biomechanics, fluid dynamics, and robotics to thoroughly study tail stiffness, which helps uncover the long-standing mystery of how tail stiffness affects tail stiffness. swimming performance, ”Zhong said. “What’s even more fantastic is that we are not just focusing on the theoretical analysis, but also on providing a practical guide to adjustable stiffness. Our adjustable stiffness strategy has proven to be effective in realistic swim missions, where a robot fish has achieved high and high speed. efficient swimming at the same time. “
Now that the team has modeled the benefits of adjustable stiffness, they will be expanding their model to other types of swimming. The first robot was designed like a tuna; now the team is thinking about how they could reach the dolphins or the tadpoles. They are also building a robot that emulates the wave movements of rays.
“I don’t think we’re going to run out of projects anytime soon. Every aquatic animal we’ve looked at has given us new ideas on how to build better swimming robots. And there are a lot more fish in the sea,” he said. Quinn said. .
A proprioceptive mechanism to allow robots to swim like fish
Adjustable stiffness allows for fast and efficient swimming in fish-like robots, Scientific robotics (2021). robotics.sciencemag.org/lookup… /scirobotics.abe4088
Provided by the University of Virginia
Quote: Robotic fishtail and elegant mathematical ratio could inform the design of next-generation underwater drones (2021, August 11) retrieved August 12, 2021 from https://techxplore.com/news/2021-08-robotic -fish-tail -elegant-math.html
This document is subject to copyright. Other than fair use for private study or research purposes, no part may be reproduced without written permission. The content is provided for information only.
[ad_2]
Source link